
At this year’s Automate 2025 event in Detroit, Realtime Robotics unveiled a powerful new tool designed to change the game in robotic automation: Resolver. This cloud-based platform is built to streamline one of the most complex and time-consuming aspects of robotics—collision-free motion planning—by bringing unprecedented speed and scalability to work cell design and deployment.
Resolver intelligently simulates and tests robot path and sequencing options in the cloud, delivering optimized, collision-free motion plans and interlock signals in minutes instead of months. The platform empowers manufacturers to reduce engineering effort by up to 50%, minimize cycle times, and dramatically improve throughput, without the usual trial-and-error bottlenecks.
To explore the impact of this breakthrough and how it’s being received by the automation community, we sat down with Ville Lehtonen, VP of Product at Realtime Robotics, for a deeper look into Resolver’s capabilities, the problems it solves, and what lies ahead for cloud-powered robotic simulation.

Ville brings over 17 years of robotics experience across Life Sciences, Logistics, and Manufacturing. He contributed to automation innovation in Life Sciences at LabMinds and HighRes Biosolutions. In Logistics, he led product efforts at Pickle Robot, scaling AI-powered unloading systems into commercial deployment. He has recently focused on real-time motion planning and adaptive control for high-mix manufacturing environments. Ville holds graduate degrees from both Oxford University and Aalto University, with a background that spans business and computer science. Originally from Finland, he now resides in Boston, MA.
1. How does Resolver redefine the traditional robot path planning process, and what makes it a game-changer for manufacturing?
Resolver doesn’t just make path planning faster; it fundamentally shifts its position in the process. Traditionally, path planning happens late in the game, after most design decisions are locked in. It’s slow, manual, and often based on assumptions that don’t hold up under real-world constraints.
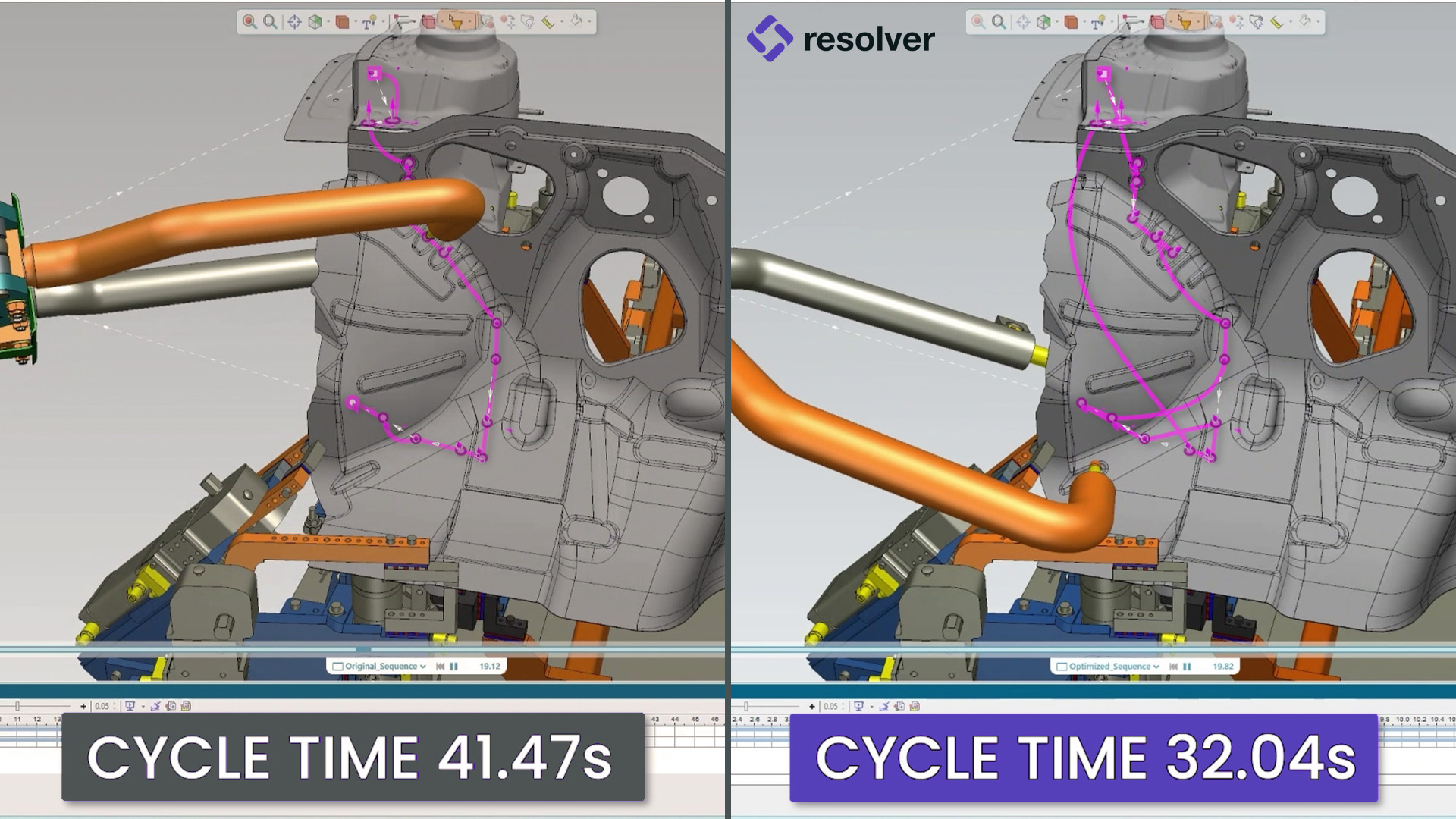
Resolver flips that model. It plans the entire cell at once – task allocation, sequencing, interlocks – all of it. Because it runs in parallel, you can test multiple robot positions and EOAT configurations with almost no overhead. And it doesn’t just tell you if something works, it shows you what works best. It’s not ‘can I reach the target?’ but ‘what setup hits my cycle time target with margin?
The ability to get real answers fast and early changes how people approach system design. Users no longer need to commit to every decision up front. Ten ideas can be explored in parallel, and teams can move forward with data, not guesswork. That’s a significant shift, especially for those used to spending weeks just to validate a single layout.
So yes, it’s a better path planner. But more than that, it turns path planning into a lever for speed, iteration, and design freedom. It reduces effort, but more critically, it has the potential to save tremendous lead time.
2. How does cloud-based simulation improve robotic workcell design, and how does Resolver leverage this to reduce engineering effort by 50%?
Resolver drives a dramatic shift in workflow. Early access users reported a 50% reduction in engineering effort. Still, more recent data suggests this can be as high as 90% for certain cells, particularly those with complex layouts or frequent design changes.
A big part of this comes from the core path planning itself. What used to take days or weeks of manual programming, often requiring expert tuning and collision avoidance tweaking, can now be generated automatically in hours. That alone is a massive saving of effort and time.
Resolver’s cloud-based architecture also adds another layer of impact:
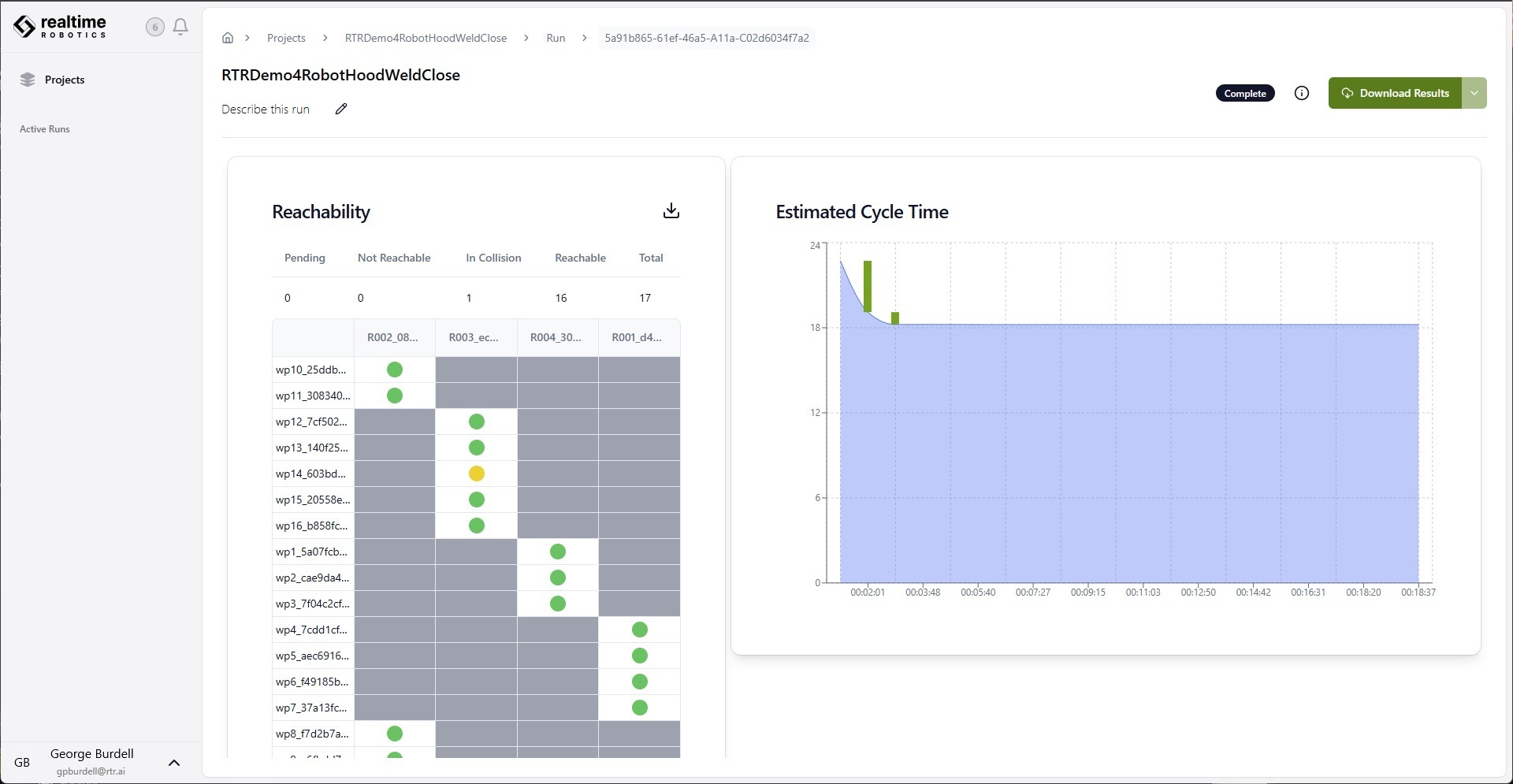
- Lead time: Because everything runs parallel on powerful cloud servers, entire workcells – or complete lines – can be validated overnight. That’s impossible when you’re limited by human resources or desktop simulation.
- Workload: In iterative tasks like EOAT selection, fixture design, or robot placement, teams typically get stuck waiting on upstream decisions. Worse, engineers lose momentum when constantly pulled into firefighting for other teams. Resolver removes much of that friction; multiple configurations can be tested in parallel, and the system returns not just ‘viable’ paths, but optimized ones.
So while path planning is the obvious efficiency win, the bigger story is how cloud-native parallelism clears bottlenecks between teams. That’s where the full 50-90% reduction in engineering effort comes from.
3. Resolver claims to reduce months of manual robot programming to just days or even hours. Can you walk us through a real-world example?
The power of Resolver isn’t just in speeding up path planning – it’s in how it transforms the entire simulation and deployment process.
Traditionally, simulation engineers spend weeks answering foundational design questions: How many robots do we need? Can the weld gun reach all targets without collisions? Will the fixture and EOAT combination hold up? These aren’t just technical issues; they define cycle time, capital cost, and production feasibility. Resolving them manually is slow and expertise-heavy.
Resolver flips that process. It acts like a virtual simulation engineer, evaluating robot positioning, tooling choices, path feasibility, and interlocks, and does so all at once, across the entire cell. And it doesn’t just say ‘this works’; it highlights which setup delivers better cycle time, higher utilization, or fewer risks. That kind of insight improves decisions from day one.
After using Resolver across a few workcells, one customer said they realized they could feasibly load every cell of a large project into the system on day one – and then have optimized robot positions, EOAT choices, and full paths by day two. That hasn’t happened yet, but the recognition was clear: the bottleneck is no longer the software; it’s just whether the team chooses to operate that way.
Fixture design is still a separate workflow, but we’re seeing early interest from partners building generative AI tools that could co-design fixtures to match Resolver’s output. If that matures, fixture iteration could even be automated and validated overnight.
In short, customers are starting to rethink what the first week of a project could look like. That shift—fueled by Resolver—could compress months of work into just a few days—not through heroics but by changing the starting line.
4. What differentiates Resolver from existing robotic simulation and optimization tools, especially in handling multi-robot systems and collision avoidance?
Resolver fundamentally differs from traditional robot simulation and optimization tools because it doesn’t solve for one robot at a time. It plans the entire workcell holistically, including task allocation, sequencing, and interlocks, across all robots. That’s the structural shift. Once you’re solving globally, you simply unlock results that aren’t possible with single-robot, sequential planning approaches.
There are a few key differentiators:
- True multi-robot planning: Resolver can handle 10, 15, or 20 robots in a single cell.
- Automatic interlock handling: Customers often tell us that Resolver is the first tool they’ve used where the robots don’t crash. That’s not magic; it’s baked into how we solve the problem.
- Sequence and allocation optimization: We don’t just find valid paths; we decide which robot should do which task, and in what order, to hit cycle time targets.
- Faster path planning: When benchmarking against a major simulation tool, one customer saw Resolver produce 20% faster plans—even in relatively simple cells.
- Cloud-native architecture: Resolver runs in parallel on scalable cloud resources, which means a user can validate a full line overnight and come back with real answers.
Resolver comparisonPut simply, Resolver isn’t a path planner with extra features—it’s a completely different model for planning, optimizing, and validating robotic cells.
5. How can small and medium manufacturers leverage Resolver to stay competitive, especially when they lack the deep engineering resources of larger enterprises?
Resolver is especially valuable for small and mid-sized manufacturers because it removes the need for one of the most brittle roles in automation: path planning. The problem isn’t just that path planning is specialized; it’s that it’s single-purpose. You might need ten hours of it one week, then nothing for a month. Compare that to CAD skills, broadly applicable across design, engineering, and manufacturing tasks.
This mismatch creates real overhead. Hiring a full-time path planner doesn’t make sense unless you’re running at a serious scale. But relying on an integrator whenever you need a change slows you down and eats into margins. And if you do hire someone, how do you know for sure that they’re good? What happens when they quit?
Resolver changes the equation. It gives organizations access to high-end planning capabilities without having to build a fragile in-house function or tie themselves to long-term contracts. More importantly, it lets you stay flexible. You don’t have to treat automation as a static thing just to make the economics work. You can adapt on the fly, without breaking the bank.
That’s how smaller manufacturers stay agile and competitive.
6. What’s next for Resolver—are there any upcoming integrations, AI enhancements, or features that will further empower robotic automation in Industry 4.0 environments?
The only integration we can publicly confirm right now is with Visual Components, which we’re launching at Automatica 2025. Several other integration projects are underway, but since they involve close collaboration with partners, we’ll coordinate announcements together with them. Longer term, you can expect integrations with more sophisticated 3D simulation platforms and even CAD tools to support early-phase design.
As for the product roadmap, we’re focused on three major pushes: some very AI-driven, others more standards- and rules-based. These include:
- Design-enabling tools: Think automatic robot positioning, EOAT selection, robot choice, and fixture design support. These are heavy on AI and aim to reduce the up-front work required to scope and build an automated cell.
- OEM standard adherence: For applications where robot motion needs to follow strict OEM guidelines, we’re building support to generate paths that align with those standards – no AI needed, just precision and correctness.
- Line-level tools: This includes features like line balancing, robot and EOAT allocation across multiple stations, and reachability validation at production scale. These will be deeply AI-enabled and cloud-powered.
The long-term vision is simple: customers bring the process they want to execute, and Resolver handles everything else. With a solid digital twin in place, this kind of full-stack automation isn’t theoretical – it’s within reach.


{kind=link}