
Autonomous vehicles (AVs) have enormous potential to allow more productive time spent in a vehicle and reduce crashes, congestion costs, energy consumption, and pollution. They not only alter vehicle ownership models and land-use patterns but create new markets and economic opportunities.
Technological advances create a continuum between conventional, fully human-driven vehicles and AVs that drive themselves partially or fully and ultimately require no driver. This continuum includes technologies (such as crash warning systems, adaptive cruise control (ACC), lane-keeping systems, and self-parking technology) that enable a vehicle to assist and make human driver decisions.
National Highway Traffic Safety Authority (NHTSA) has created a five-level hierarchy to help clarify this continuum. In this post, we have summarized those five levels, defined by NHTSA.
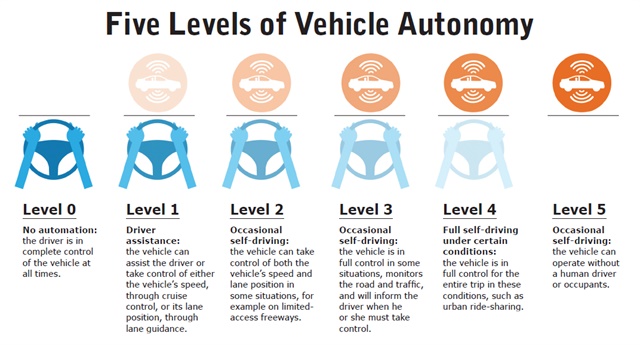
Level 0 (no automation): The driver is in complete and sole control of the primary vehicle functions (brake, steering, throttle, and motive power) at all times, and is solely responsible for monitoring the roadway and for safe vehicle operation.
Level 1 (function-specific automation): Automation at this level involves one or more specific control functions; if multiple functions are automated, they operate independently of each other. The driver has overall control, and is solely responsible for safe operation, but can choose to cede limited authority over a primary control (as in ACC); the vehicle can automatically assume limited authority over a central control (as in electronic stability control); or the automated system can provide added control to aid the driver in certain normal driving or crash-imminent situations (e.g., dynamic brake support in emergencies).
Level 2 (combined-function automation): This level involves automation of at least two primary control functions designed to work in unison to relieve the driver of controlling those functions. Vehicles at this level of automation can utilize shared authority when the driver cedes active primary control in certain limited driving situations. The driver is still responsible for monitoring the roadway and safe operation and is expected to be available for control at all times and on short notice. The system can relinquish control with no advance warning, and the driver must be ready to control the vehicle safely.
Level 3 (limited self-driving automation): Vehicles at this level of automation enable the driver to cede full control of all safety-critical functions under specific traffic or environmental conditions, and in those conditions to rely heavily on the vehicle to monitor for changes in those conditions requiring transition back to driver control. The driver is expected to be available for occasional control, but with sufficiently comfortable transition time.
Level 4 (full self-driving automation): The vehicle is designed to perform all safety-critical driving functions and monitor roadway conditions for an entire trip. Such a design anticipates that the driver will provide destination or navigation input, but is not expected to be available for control at any time during the trip. This includes both occupied and unoccupied vehicles. By design, safe operation rests solely on the automated vehicle system.

")



{kind=link}