
The anatomy or the structure of a robot depends on the basic components such as the wrist, arm, and body used to build it for a specific operation. An industrial robot comprises a mechanical manipulator and a controller that allows it to move and perform other tasks.
The mechanical manipulator comprises joints and links that allow the manipulator’s end to be positioned and oriented relative to its base. The controller operates the joints in a coordinated manner at the same time to complete a programmed work cycle.
A robot joint is similar to a joint in the human body. It allows for relative movement between two body parts. Industrial robots typically have five or six linear or rotating joints.
Robots are mostly divided into four major configurations based on their appearances, sizes, etc., including cylindrical configuration, polar configuration, jointed arm configuration, and cartesian coordinate configuration.
1. Cylindrical configuration
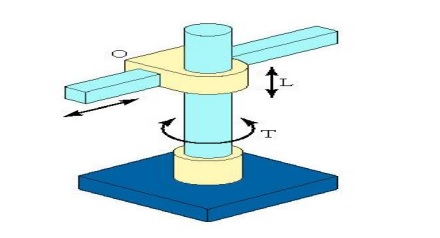
The cylindrical configuration has two perpendicular prismatic joints and a revolute joint. A vertical column and a slide that moves up and down the column are used in this setup. The robot arm is connected to the slide and can move radially around the column. By rotating the column, the robot can achieve a workspace that approximates a cylinder. The cylindrical configuration offers good mechanical stiffness.
Advantages
• Increased rigidity, and
• Capacity to carry high payloads.
Disadvantages
• Floor space required is more, and
• Less work volume.
• Accuracy decreases as the horizontal stroke increases.
2. Polar configuration
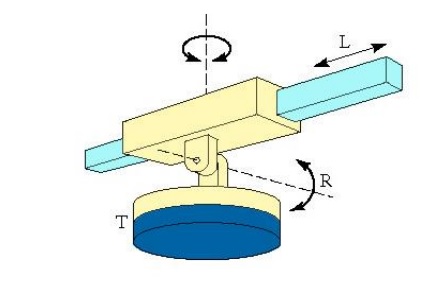
A prismatic joint can be raised or lowered about a horizontal revolute joint in the polar configuration. A rotating base supports the two links. These various joints can move the arm endpoint within a partial spherical space. It is also called a spherical co-ordinate‖ configuration, which allows manipulation of objects on the floor.
Advantages
• Long reach capability in the horizontal position.
Disadvantages
• Vertical reach is low
• Low mechanical stiffness
• Complex construction
• Accuracy decreases with the increasing radial stroke.
3. Jointed arm configuration
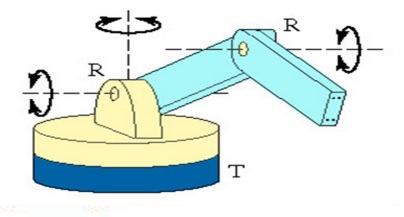
Widely-used jointed arm configuration is similar to that of a human arm. It comprises two straight links representing the human forearm and upper arm and two rotary joints representing the elbow and shoulder joints, which are mounted on a vertical rotary table corresponding to the human waist joint. As a result, it can be controlled at any adjustments in the workspace. These types of robots perform several operations like spray painting, spot welding, arc welding, and more.
Advantages
• Increased flexibility,
• Huge work volume, and
• Quick operation.
Disadvantages
• Very expensive,
• Difficult operating procedures, and
• Plenty of components.
4. Cartesian co-ordinate configuration
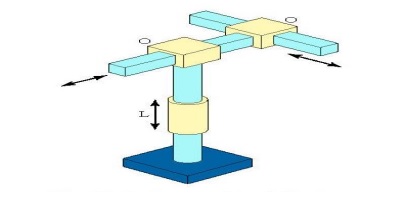
Cartesian or rectangular coordinate configuration is constructed by three perpendicular slides, giving only linear motions along the three principal axes. It consists of three prismatic joints. The endpoints of the arm are capable of operating in a cuboidal space. The cartesian arm gives high precision and is easy to program.
These robots are also called XYZ robots because they are equipped with three rotary joints to assemble XYZ axes. The robots will process in a rectangular workspace using these three joints movement. It can carry high payloads with the help of its rigid structure. It is mainly integrated with pick and place, material handling, loading, unloading, etc.
Advantages
• Highly accurate & speed,
• Fewer costs,
• Simple operating procedures, and
• High payloads.
Disadvantages
• Less work envelope, Reduced flexibility.
• Low dexterity (not able to move quickly and easily)
• Limited manipulability

: How subscription-based automation is redefining industry")



{kind=link}